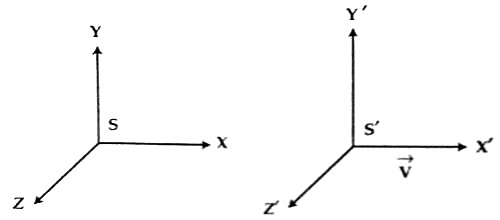
Above are two frames in Cartesian coordinates, \(S\) and \(S^{\prime}\). We have coordinates \((x, y, z)\), which define our dimensions.
Inertial Frame
An inertial frame is a frame of reference for which acceleration is zero. In other words:
\begin{equation} \frac{d^{2}x}{dt^{2}} = \frac{d^{2}y}{dt^{2}} = \frac{d^{2}z}{dt^{2}} = 0 \end{equation}
In the absence of gravity if \(S\) and \(S^{\prime}\) are two inertial frames they can only differ from each other by (and/or):
- a translation
- a rotation
- a motion of one frame wrt the other under constant velocity